
IAAC – Institute for Advanced Architecture of Catalonia
Global Summer School Program 2021
Online Course: Design for Robotics // Behavioural design and fabrication
Duration: from the 19th until the 22nd July 2021
DESIGN FOR ROBOTICS
FABRICATION THROUGH REMOTE CONTROLLED ROBOTS
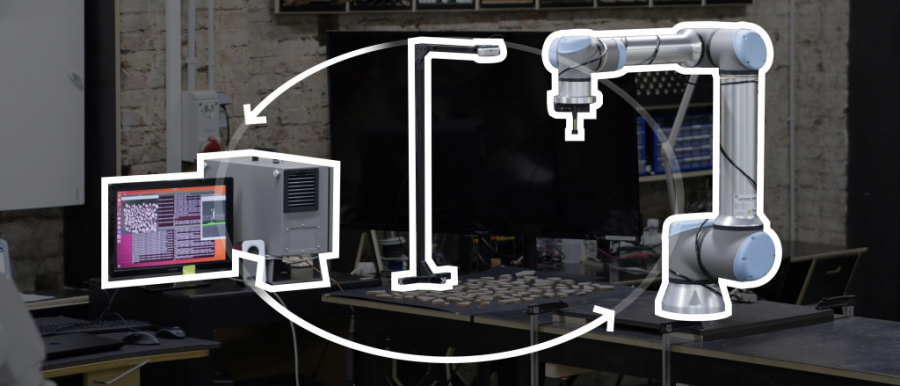
Ph credits: IAAC – Master in Robotics and Advanced Construction workshop 2.2 – 2020/2021.
Syllabus
Soft robotic fabrication processes are flexible, adaptable and evolving and rely on a dense network of active information and feedback loops, unlike the conventional fabrication processes which are linear procedures of materialisation (Kwinter,1993).
This Workshop focuses on the use of a computational design algorithm in combination with robotic fabrication and sensing to augment the design and construction process for no-standardised material. Although reusing reclaimed material can significantly reduce the environmental impact in building construction, current design processes are not set up for this shift in thinking. Contrary to conventional practices, designing within the constraints of available material means that geometry and topology cannot be fully pre-determined.
Industrial robotic arms are very precise devices, used to carry out complex tasks in known and controlled environments. What if an industrial robotic arm had to perform different tasks in unknown environments? In recent years, vision devices have evolved from being a device for taking pictures and saving memories to being the sense of sight for machines. Now, machines can see, orient themselves, make decisions and carry out tasks for which they were not explicitly programmed. In this way, robots acquire a layer of intelligence that they did not have when they were used as reproducers of pre-programmed tasks, giving the robots a certain autonomy that allows them to act in new situations, new environments without supervision or having to be reprogrammed.
In order to challenge the conventional conceptual framework posed by notational systems, this workshop will focus on the design and fabrication of 2D no-standardised elements, offering the opportunity to develop experience on working with robotic sensor data and integrate the data into the computational design. During the workshop, students will explore different design intentions through the definition of performance criteria parameters, which are constantly evaluated and adjusted in real-time. The application generated at the end of the workshop will be the assembly of a mosaic using recycled leftover pieces where the closed-loop system will guide the robotic arm to choose the right piece in each step of the process.
During the GSS21 Design for Robotics workshop the participants will have a unique opportunity to remote control robots in IAAC, guided by the staff and will learn about the necessary technology to execute the project while having the possibility to design and make their own assembly processes.
Learning objectives
At course completion the student will:
> Be introduced to integrated computational design and robotic fabrication
> Be introduced to robotic fabrication
> Learn the concepts of sensor feedback and machine vision
> Learn how to perform online robotic control methods
Previous Knowledge / Students background requirements
The workshop is open to all applicants with a bachelor degree related to the fields of Architecture, Design, Arts and Engineering willing to engage in the program. No previous extensive knowledge is required. The participants will receive lectures and classes to be introduced to the workshop’s topics, softwares and tools.
IAAC Faculty

Soroush Garivani is an architect and researcher, interested in the multidisciplinary and multi-scalar approaches in architecture. He holds a Master in Advanced Architecture (2018) followed by a Master in Advanced Robotics and Construction (2019) from IAAC, Barcelona. His research explores integration of new fabrication methods, intelligent material systems, and computational tools. He has collaborated as a Computational designer with Appareil, Barcelona and The Alliance, Tehran. Currently he is working as a roboticist at Noumena.
EDEK Faculty

Seyed Mobin Moussavi is a Research Associate (and doctoral candidate) at the Tragwerksentwurf (TWE) at the University of Kassel. He holds a 5-year architectural engineering degree, as well as a master in science from Integrative Technologies and Architectural Design Research program (ITECH) at University of Stuttgart. In his master thesis “Design based on availability”, he introduces a design methodology for corrugated shell structures from folded sheet metal of variable geometries and properties, in which the design goal adapts to available material. Robotic fabrication of the project included object recognition, metal sheet folding and consideration of different metal spring back behaviour.
WEEKLY SCHEDULE & TIMETABLES
Option 1 – Synchronous calendar (Barcelona time – GMT+2)
Recommend to European, African, Asian and Australian participants.
From Monday 19th July until Thursday 22nd July 2021
Teaching activities will run from 10.00 to 14.00 GMT+2
– 8 hrs of live teaching
– 8 hrs of live mentoring and exercises review
– 1 hr of IAAC summer lecture
– Final GSS diploma certificate ceremony
Option 2 – Asynchronous calendar (America time – GMT-4)
Solution recommended to participants from all the time zones who are looking for a more flexible schedule.
From Monday 19th July until Friday 23rd July
Live teaching activities will run from 11.00 am to 1.00 pm (GMT-4)
– 8 hrs of recorded teaching
– 8 hrs of live mentoring and exercises review
– 1 hr of IAAC summer lecture
– Final live GSS diploma certificate ceremony
Main tools
Main & secondary software
Rhinoceros 6.0 or 7.0 . The 90-day trial version can be downloaded from the website www.rhino3d.com/eval.html
Other software to be specified by session.
Because Grasshopper 3D works best for the Windows operating system, we recommend students to have an installation of Windows (preferable Windows 10 x64). If you have an Apple computer, it is recommended that you install Windows on Boot Camp which will perform better than Parallels or VMWare. It is recommended that you max out the RAM potential on your computer.
Plugins
All Grasshopper plugins will be provided by the instructors.
Hardware
8 GB memory (RAM) or more
At least 600 MB space in the hard drive
We recommend a compatible video card for OpenGL 4.1.